想象中的無人機集群
當前,無人機是航空器發展的熱門領域。伴隨著無人機熱的持續升溫,新概念也大量涌現。分布式無人機與無人機集群便是例子。什么是分布式無人機?什么是無人機集群?二者之間什么關系?對于諸如此類的問題,非專業人士大都一知半解。好吧,我們就來說說這些問題。
一、什么是分布式無人機?
分布式無人機,即采用分布式結構的無人機。所謂分布式結構,就是將目前集成化的功能系統拆分為若干物理分離、結構相對簡單、功能相對專一的子系統,通過信息互通,保持或擴展原有功能。做一個比喻,如果把系統的結構稱之為“形”,系統的功能稱之為“神”,分布式結構就是“形散而神不散”。
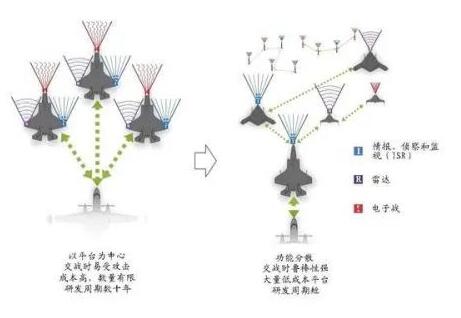
空中作戰從集成到分布
分布式結構的概念,由美國人提出。2010年5月,美國空軍首席科學家在《技術地平線報告——2010-2030年間空軍科學與技術構想》中首次提出了分布式結構的概念。
分布式結構是相對于集成化而言的。所謂集成,就是把一些孤立、分散的事物或元素集中在一起,產生聯系,構成一個功能整體。集成化的水平,可以用集成度進行度量。以集成電路為例,目前元件的集成度已經超過了1億個,組件數超過了109個。手機,就是集成化的產物,從最初的單一通話到現在的智能手機,就是元器件和功能模塊的集成度不斷提高的結果。無人機的發展也離不開零部件、功能模塊與單元體的高度集成,集成化帶來了無人機功能和運用領域的不斷擴展,同時也帶來了一些問題。
這些問題突出表現在兩個方面:一是隨著無人機集成度的不斷提高,其技術含量和復雜程度也不斷提升,研發周期不斷拉長,研發成本不斷攀升,無人機的成本優勢逐漸喪失。目前,就大型高端無人機而言,在單機采購成本上無人機已經沒有多少優勢,其成本優勢主要體現于任務飛行成本。據統計,有人駕駛飛機的訓練飛行時間約占總壽命的95%,任務飛行時間僅占5%左右,而無人機的大部分訓練都可以在模擬器上進行,任務飛行時間可以達到總壽命的50%左右,因此,無人機的每小時任務飛行費用要顯著低于有人駕駛飛機。二是對于高度集成化的無人機,其任一任務系統的損失都可能導致任務失敗或系統失靈,從而影響其戰場生存力。
面對問題,迫使美軍思考新的出路,分布式結構也就應運而生。美軍希望通過分布式結構推出一大批功能單一、成本低廉、可以大量裝備的無人機,部分取代目前成本居高不下的高端無人機,用數量優勢取代質量優勢。美軍認為在一定條件下,數量就是質量。可見,分布式結構其實就是“逆集成化”,是對集成化的反其道而行之。當然,必須指出,分布式結構不是對集成化的否定,而是提供了一種與集成化長期共存的新選擇。
分布式發展的最大好處是通過拆分和冗余技術的組合,在降低研制、使用費用與風險的同時,還具有遠遠超過傳統武器裝備的戰場生存力。目前,實現航空武器裝備的分布式發展主要面臨兩大難題:一是通信問題,如何在強對抗環境下保證子系統間通信的有效帶寬、時效性和抗干擾等問題;二是自主協同控制問題,空中戰場瞬息萬變,如何保證物理分離的各子系統圍繞作戰任務,在作戰空間實現快速協同。只有解決了這些問題,分布式結構才能走向實用。近年來,5G通信網絡技術和人工智能技術的發展為解決上述問題帶來了新的希望。
二、什么是無人機集群?
集群,是眾多個體聚集在一起,實現共同目的的群體協同行為。

魚類集群
集群現象存在于自然界,如一些魚類、鳥類、昆蟲類和哺乳類等動物的自主集群。動物集群有四個特點:一是無中心,沒有任何個體處于主導地位,任一個體的消失或功能喪失,都不影響群體功能;二是自主協同,每一個體依據相鄰周邊狀況,自主控制自身行為,實現群體間的自主協同;三是自主重構,任何原因導致集群受損或受到影響,集群都能夠自主恢復或建立新的構型并保持穩定;四是趨利避害,通過集群間的信息、資源共享與相互協作,動物集群可以增加個體發現、捕獲獵物的機會,同時也有利于規避天敵,提高個體的生存率。
人們關注動物集群由來已久。近年來,隨著無人機技術的發展,特別是機間通信技術和自主控制技術的發展,借鑒動物集群實現無人機集群的問題引發人們高度關注。無人機集群,包括同構集群和異構集群。由相同類型無人機構成的集群是同構集群,由不同類型無人機構成的集群是異構集群。推而廣之,圍繞同一任務,無人機和有人機也可以構成廣義異構集群。目前,在研究動物集群的基礎上,對于無人機集群問題的研究主要集中在兩個方面,一是無人機自主集群的技術實現,二是無人機自主集群的運用研究。
無人機自主集群的技術實現。近年來,關于無人機集群的報道屢見不鮮,如今年6月2日,為慶祝建校一百周年,哈爾濱工業大學放飛了1000架四旋翼無人機,進行了燈光秀表演,炫酷全場。此前,2018年7月19日,為慶祝公司成立50周年,英特爾公司用2018架四旋翼無人機在空中打出了“intel 50”字樣。目前,固定翼無人機的世界放飛紀錄,是2017年中國電子科技集團創造的119架。這類表演可以分為兩種情形:一是通過飛行過程的程序控制,實現無人機的空中集群與飛行表演,目前的表演大多都是這種情形。二是通過無人機的自主控制與機間協同,實現無人機的自主集群。真正的無人機自主集群,其實是這種。現有報道中,這種情形極其少見。不是不愿意做,而是絕大多數表演者根本做不到。要實現無人機自主集群,在技術上至少需要解決一系列問題,包括無人機自主控制算法、無人機飛行與環境數據實時采集與傳輸、寬帶大容量抗干擾網絡通信鏈路、飛行任務規劃、路徑規劃、編隊控制等。目前,關于無人機自主控制的公開項目主要有美國國防部先期規劃局(DAPAR)的“小精靈”項目、拒止環境中協同作戰(CODE)項目、美國空軍的山鶉(Perdix)項目、美國海軍的低成本無人機集群技術項目等。
無人機自主集群的運用研究。包括作戰使用研究和民用研究。前面提到的美軍無人機集群項目中也都包含了作戰使用研究。無人機集群主要用于空中突防與防空壓制,一是利用集群無人機的低成本優勢,大量消耗敵方防空導彈,使對手“打不起”;二是利用無人機集群的數量優勢,造成敵方防空預警系統和通信系統的“通道飽和”,使對手“看不見”“動不了”。此外,無人機集群也可以用于對面打擊和城市巷戰。歸根結底,無人機集群用于作戰,主要是發揮數量優勢,讓對手無從招架。無人機集群用于民用領域,同樣是發揮無人機集群的數量優勢,有望運用于物流快遞、農業播種植保、應急救援中的通信組網、遙感對地觀測以及燈光秀等。
三、二者之間什么關系?
就概念而言,二者本質不同,說的是不同領域的兩碼事。分布式,說的是無人機結構,相對于目前的集成式而言。集群,說的是無人機的使用方式,相對于無人機的單平臺使用和小機群使用而言。
但是,二者也不是風馬牛不相及,而是互為依托,相互促進。如果沒有分布式結構,也就很難有真正意義上的低成本無人機,無人機集群也就很難走向實際運用。同樣,如果沒有無人機集群的相關研究和技術鋪墊,分布式結構所要求的信息互通、功能不減也就無從實現。由此決定了二者在一些領域技術上是相通的,在實際發展中也是相互促進的。
無人機集群與分布式無人機,為未來無人機發展開辟了新路,并有望帶來空中戰場的革命性變化。盡管目前二者都還處于概念探討與技術研究階段,距離工程化還有很長的路要走,但是未來值得期待,讓我們拭目以待。【作者簡介】李清,航空工業發展研究中心研究員,航空工業集團公司特級技術專家,從事航空產品發展戰略與裝備體系研究。






 新浪微博
新浪微博
 關注微信
關注微信